ESP32 - Rotary Encoder Servo Motor
In this tutorial, We are going to learn how to program ESP32 and the rotary encoder to control the angle of the servo motor.
Hardware Used In This Tutorial
Or you can buy the following kits:
| 1 | × | DIYables ESP32 Starter Kit (ESP32 included) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Buy Note: In case of using multiple servo motors, it is recommended to use the PCA9685 16 Channel PWM Servo Driver Module to save MCU pins and simplify the wiring process.
Introduction to Servo Motor and Rotary Encoder
Unfamiliar with servo motor and rotary encoder, including their pinouts, functionality, and programming? Explore comprehensive tutorials on these topics below:
Wiring Diagram
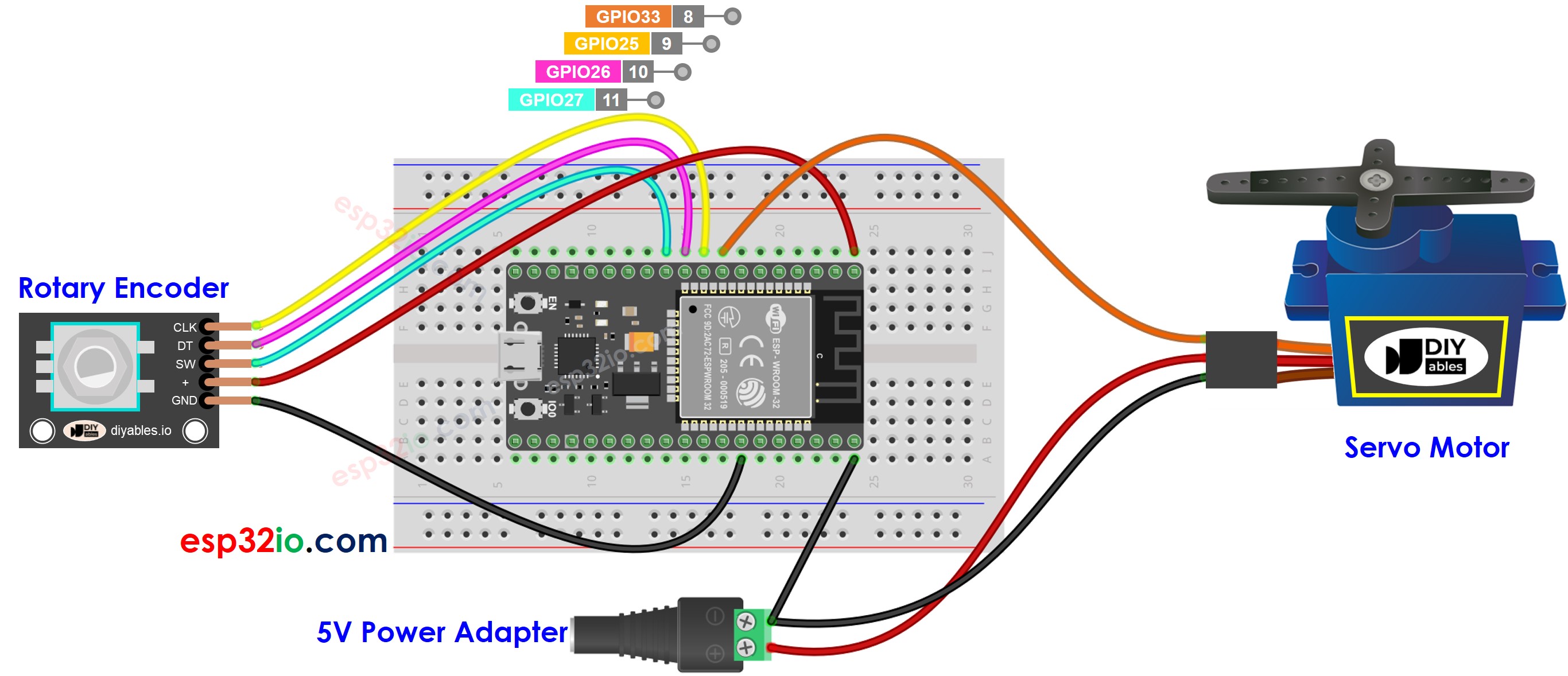
This image is created using Fritzing. Click to enlarge image
If you're unfamiliar with how to supply power to the ESP32 and other components, you can find guidance in the following tutorial: The best way to Power ESP32 and sensors/displays.
ESP32 Code
Quick Instructions
- If this is the first time you use ESP32, see how to setup environment for ESP32 on Arduino IDE.
- Do the wiring as above image.
- Connect the ESP32 board to your PC via a micro USB cable
- Open Arduino IDE on your PC.
- Select the right ESP32 board (e.g. ESP32 Dev Module) and COM port.
- Connect ESP32 to PC via USB cable
- Open Arduino IDE, select the right board and port
- Copy the above code and open with Arduino IDE
- Click Upload button on Arduino IDE to upload code to ESP32

- Open Serial Monitor
- Rotate the rotary encoder
- See the servo motor's rotation
- See the result on Serial Monitor
Code Explanation
Read the line-by-line explanation in comment lines of source code!
Video Tutorial
Making video is a time-consuming work. If the video tutorial is necessary for your learning, please let us know by subscribing to our YouTube channel , If the demand for video is high, we will make the video tutorial.