ESP32 - Stepper Motor and Limit Switch
In this ESP32 tutorial, we'll explore how to use ESP32, a limit switch, the L298N driver, and a stepper motor. Specifically, we'll cover:
- Stopping the stepper motor when a limit switch is touched.
- Changing the stepper motor's direction when a limit switch is touched.
- Changing the stepper motor's direction when two limit switches are touched.
These topics will empower you to create controlled and versatile motion applications with your ESP32.
Hardware Used In This Tutorial
Or you can buy the following kits:
| 1 | × | DIYables ESP32 Starter Kit (ESP32 included) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Introduction to Stepper Motor and Limit Switch
If you do not know about stepper motor and limit switch (pinout, how it works, how to program ...), learn about them in the following tutorials:
- ESP32 - Limit Switch tutorial
- ESP32 - Controls Stepper Motor tutorial
Wiring Diagram
This tutorial provides the ESP32 codes for two cases: One stepper motor + one limit switch, One stepper motor + two limit switches.
- Wiring diagram between the stepper motor and a limit switch
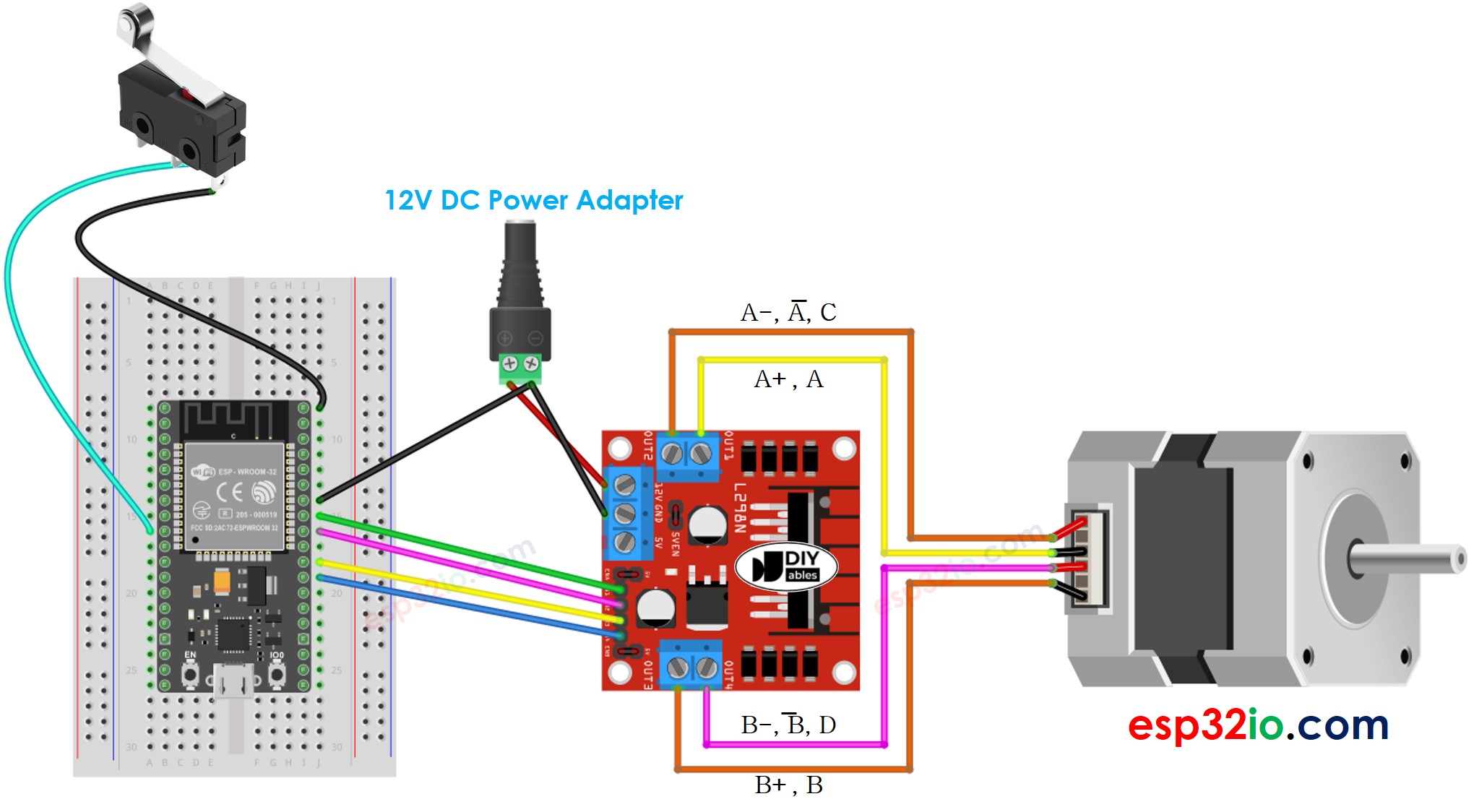
This image is created using Fritzing. Click to enlarge image
- Wiring diagram between the stepper motor and two limit switches
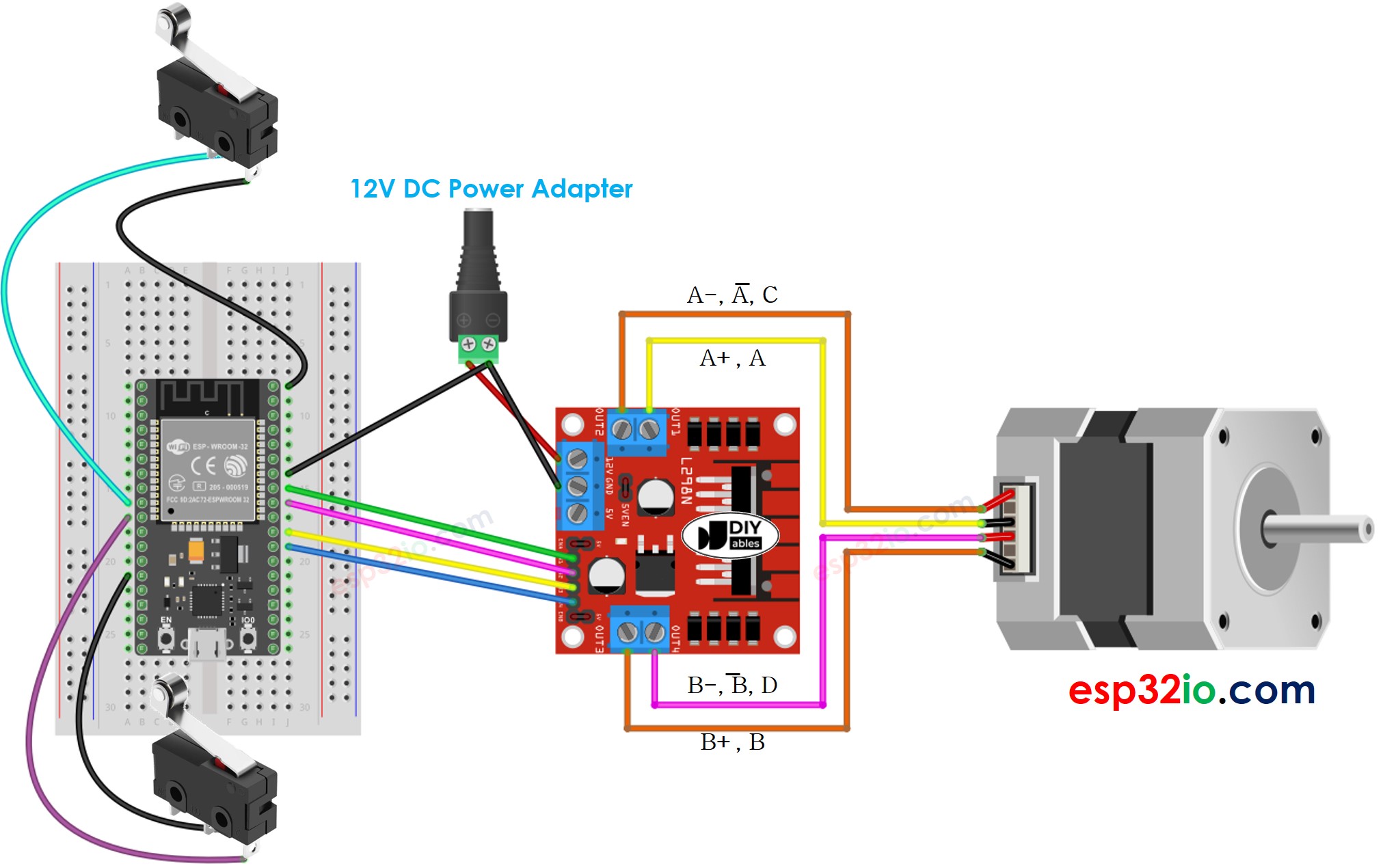
This image is created using Fritzing. Click to enlarge image
※ NOTE THAT:
Depending on the stepper motor, the wiring connection between the stepper motor and L298N may be different. Please take a close look at this ESP32 - Stepper Motor tutorial to see how to connect the stepper motor to the L298N motor driver.
If you're unfamiliar with how to supply power to the ESP32 and other components, you can find guidance in the following tutorial: The best way to Power ESP32 and sensors/displays.
ESP32 Code - Stop Stepper Motor by a Limit Switch
There are several ways to make a stepper motor stop:
- Call stepper.stop() function: This way does NOT stop the stepper motor immediately but gradually
- Do NOT call stepper.run() function: This way stops the stepper motor immediately
The below code make a stepper motor spin infinitely and stop immediately when a limit switch is touched
Quick Instructions
- If this is the first time you use ESP32, see how to setup environment for ESP32 on Arduino IDE.
- Do the wiring as above image.
- Connect the ESP32 board to your PC via a micro USB cable
- Open Arduino IDE on your PC.
- Select the right ESP32 board (e.g. ESP32 Dev Module) and COM port.
- Connect ESP32 to PC via USB cable
- Open Arduino IDE, select the right board and port
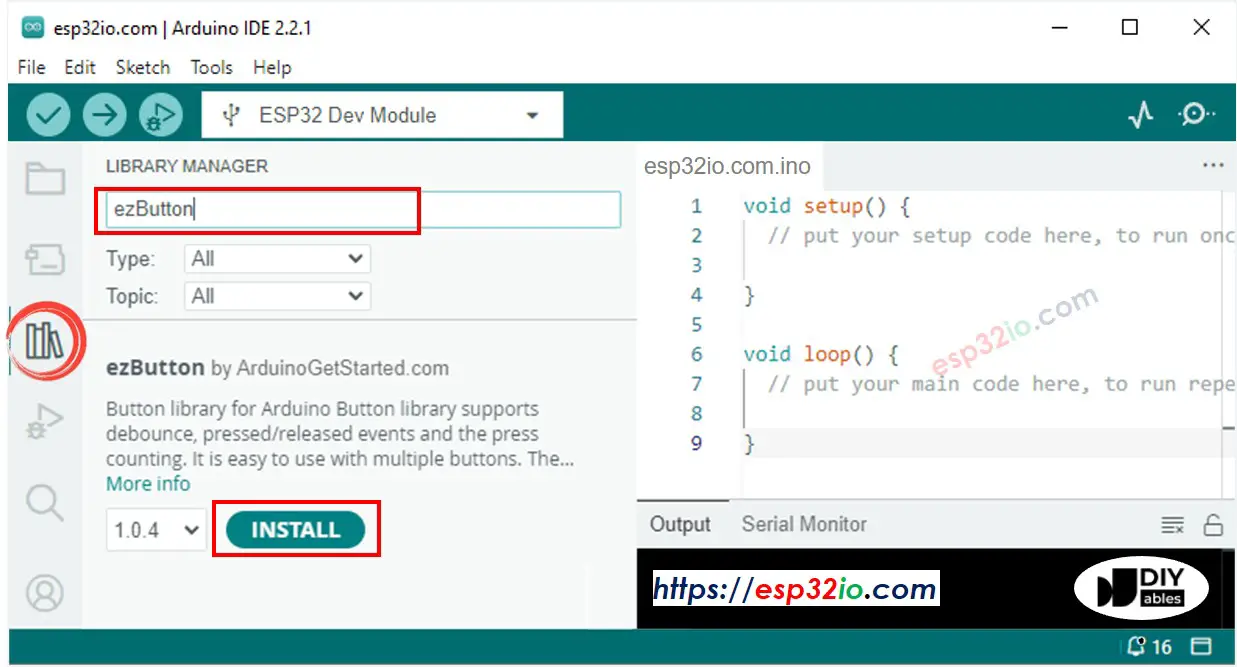
- Click to the Libraries icon on the left bar of the Arduino IDE.
- Search “ezButton”, then find the button library by ArduinoGetStarted.com
- Click Install button to install ezButton library.
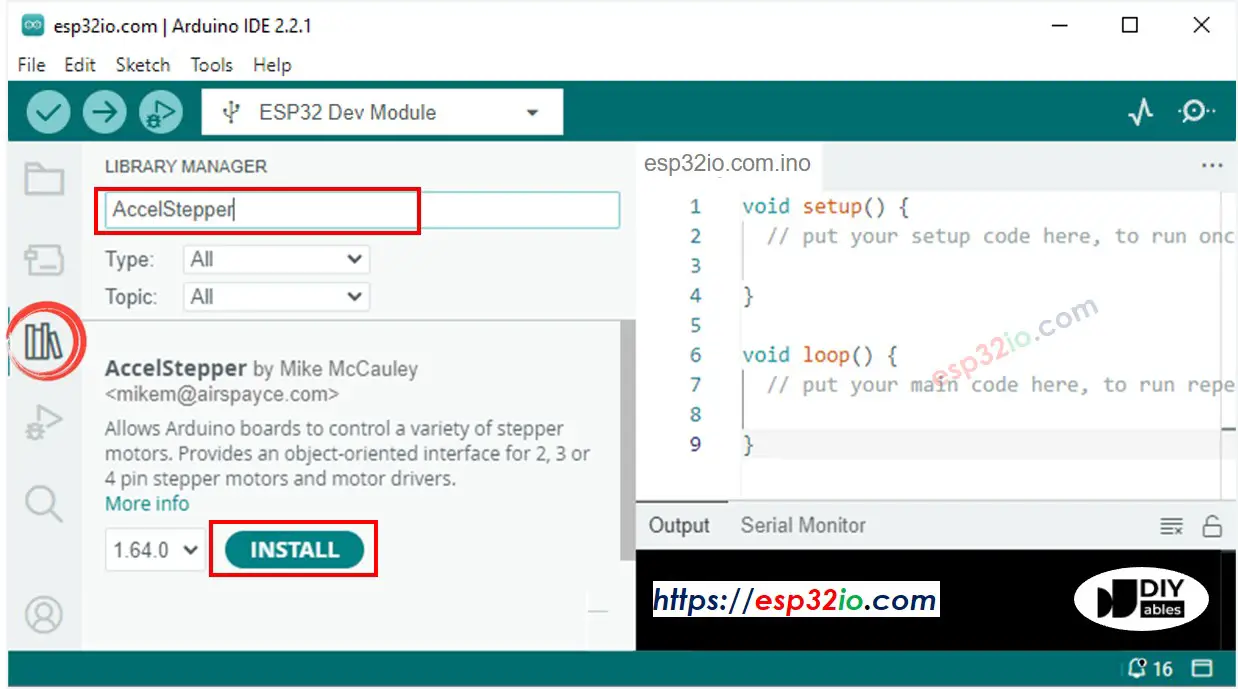
- Search “AccelStepper”, then find the AccelStepper library by Mike McCauley
- Click Install button to install AccelStepper library.
- Copy the above code and open with Arduino IDE
- Click Upload button on Arduino IDE to upload code to ESP32
- If the wiring is correct, you will see the motor rotates clockwise direction.
- Touch the limit switch
- You will see the motor is stopped immediately
- The result on Serial Monitor looks like below
Code Explanation
Read the line-by-line explanation in comment lines of code!
ESP32 Code - Change Direction of Stepper Motor by a Limit Switch
The below code make a stepper motor spin infinitely and change its direction when a limit switch is touched
Quick Instructions
- Copy the above code and open with Arduino IDE
- Click Upload button on Arduino IDE to upload code to ESP32
- If the wiring is correct, you will see the motor spins in the clockwise direction.
- Touch the limit switch
- You will see the stepper motor's direction is changed to the anti-clockwise
- Touch the limit switch again
- You will see the stepper motor's direction is changed to clockwise
- The result on Serial Monitor looks like below
ESP32 Code - Change Direction of Stepper Motor by two Limit Switches
The below code make a stepper motor spin infinitely and change its direction when one of two limit switches is touched
Quick Instructions
- Copy the above code and open with Arduino IDE
- Click Upload button on Arduino IDE to upload code to ESP32
- If the wiring is correct, you will see the motor spins in the clockwise direction.
- Touch the limit switch 1
- You will see the stepper motor's direction is changed to anti-clockwise
- Touch the limit switch 2
- You will see the stepper motor's direction is changed to clockwise
- The result on Serial Monitor looks like below
Video Tutorial
Making video is a time-consuming work. If the video tutorial is necessary for your learning, please let us know by subscribing to our YouTube channel , If the demand for video is high, we will make the video tutorial.